Congratulations to Michael Ramos, the winner of the Fusion 360 model of the month for July. Hear more about Michael, his gorgeous Exagoa design, his use Fusion 360 and future plans.

Hi, my name is Michael Ramos. I am a digital artist currently residing in Santa Clarita, Ca. I earned a degree in computer graphics from California State University Chico. I am currently focusing on learning 2D and 3D art as a digital medium.
I began using Fusion 360 in December of 2015. I was searching for new software that not only enabled parametric modeling, but provided accurate results visually. I had been using Maya since 2009 and decided to make a switch from a polygonal workflow to a CAD based system. Fusion 360 has a very simplified interface in comparison to other programs. That being said, creation has never been easier! Designs that were difficult to create polygonally are simplified into 1 to 2 steps. Operations such as Booleans, which are huge hurdles for 3D artists, are made instantly. When designing, I typically start with pen and paper to construct an idea and then I start from scratch in Fusion 360. For more sophisticated projects that require a large amount of detail, I prefer to kit bash components within Fusion 360 to get an end result.
After discovering the capabilities of the Fusion 360, I wanted to embark on a journey of either creating designs on the fly or things that have interested me all of my life. My personal passions and interests include riding BMX bikes, music production, traditional art, roller coasters and theme park rides. While designing, I often try to take these all into account.
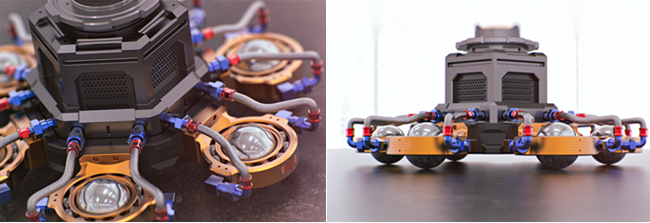
My Exagoa model takes from experience working as bike mechanic in a bike shop. This includes working with bearings, cables, and specialty parts that have functional properties. Exagoa serves as an abstract concept design of what a robot could be composed of. Its rechargeable battery core feeds power to its hydraulic system to enable movement of the bearing collars. Its ball bearing wheels allow for full maneuverability across a smooth surface. An operator can control the robot wirelessly. Exagoa could also be equipped with sensors or cameras for diagnostic purposes.
For future projects, I plan to focus on theme park rides, robots, and abstract 3D designs. Ever since I was a child I have been intrigued by motion and mechanics. Today, as an artist, I am continually trying to push the limit with creative ideas. I try to learn something new every day, whether it’s on a small or grand scale.
I would like to give a very big thank everyone at Autodesk for giving me this opportunity for the model of the month. I really appreciate it. Check out more of my Fusion 360 designs here. You can find my portfolio at http://www.michaelramosart.com or you can follow me on Tumblr or Instagram.