See how ACWA-ROBOTICS designed a water pipe-navigating robot that helps water management systems prevent leaks and conserve water.

Turning on the tap for a glass of water or to wash the dishes is a seemingly simple, everyday occurrence that we often take for granted. But the journey water takes to reach a faucet is epic, as it travels through one of the most complex and inaccessible networks imaginable.
The sheer number of drinking-water pipes is massive—and the system is mainly underground. Trying to monitor pipe conditions and predict potential maintenance or failures has been next to impossible—until now. Robots are on the way to help keep the water flowing, and even help us to conserve it.
Developing new robotics for water systems
ACWA-ROBOTICS is a startup in France that designs, develops and manufactures autonomous robots for the mapping and inspection of drinking water networks. According to the company, the drinking water networks in France represent a linear distance of one million kilometers, which is equal to all the roads in the country combined. The worldwide estimate is around 40 million kilometers.
ACWA-ROBOTIC’s goal is to provide reliable and precise information on the state of these water infrastructures. Operations can be optimized with better management and insights of pipes that may need repair or replacement. Water departments can also plan and prioritize investments based on data from the existing network. Above all, millions of gallons of water can be saved by identifying leaks and enabling preventative maintenance.
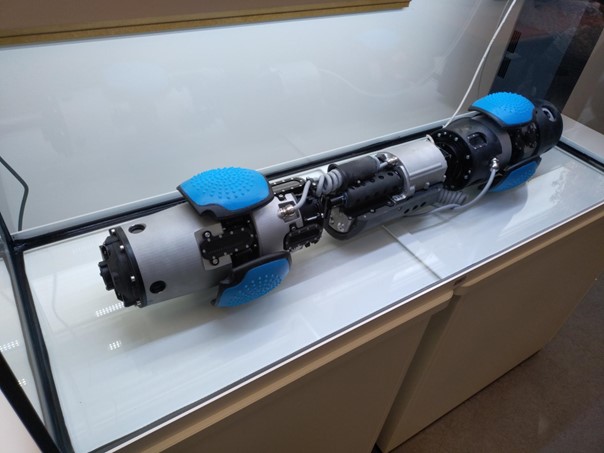
In 2017, Jean-François Rossi first realized the need for a solution and started working on the idea for a pipe-traveling water robot. Joined by Jean-François Guiderdoni in 2018, they set up a team of four people to develop the first proofs of concept. Now, with a team of 14 people, the company has completed its pre-production version of their first robot, named ACWA Pathfinder, and will begin commercial deployments by summer of 2023.
Collecting data in water pipes
Sending a robot on a trip through a water pipe network is just as complex as you might think. First, there is the collection of information about the network and what the robot should be monitoring. Then preparatory work begins to create introduction points and positioning points to recharge (after 3 kilometers) as the robot travels the network to map and collect data. Once the inspection is complete, the processed data is provided to the client via ACWA’s SaaS application or as a dataset.
But what kind of information is the robot actually collecting? It gathers the diameter of the pipe, high-definition images, measurement of residual thickness of the pipe, presence of surface oxidation and even audio. Water data includes temperature, water flow speed, water hardness, turbidity and pH. All the data is structured around a set of points defining the route of the pipeline, which are geo-referenced by latitude, longitude and elevation (in relation to land surface) with a maximum deviation of only 40 cm from reality.
Water pipe robot becomes a reality with Autodesk Fusion 360
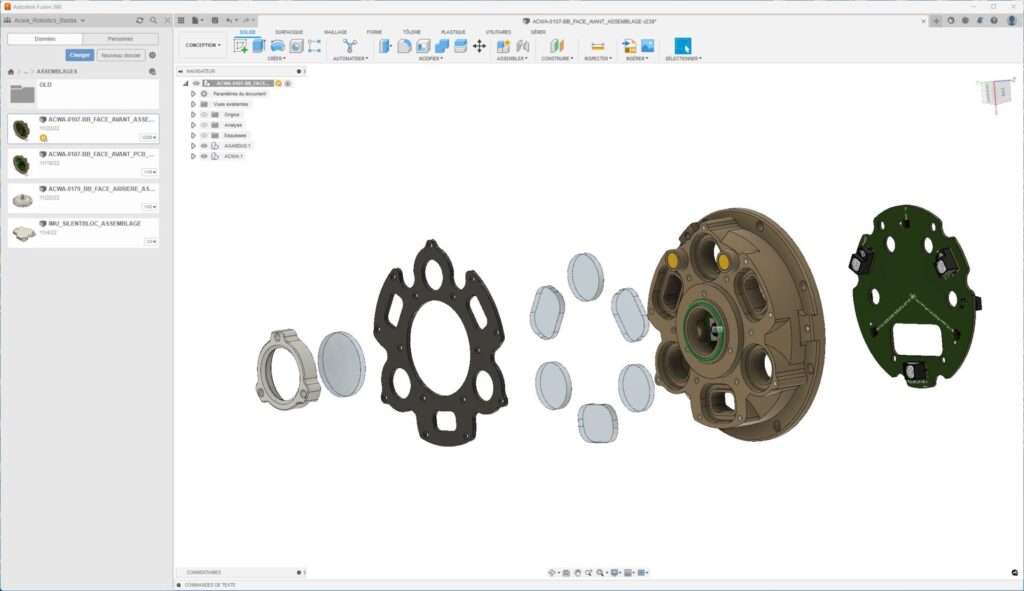
From the very beginning, ACWA-ROBOTICS used Autodesk Fusion 360 to bring the robot to life. The main challenge? Designing a robot that was sufficiently compact to easily navigate the pipes without interrupting or disturbing the flow of water _and_carry all the elements and sensitive electronics necessary for the data collection.
“The robot requires 250 different parts, and the main body is made of aluminum,” says Jean-François Rossi, president and technical director, ACWA-ROBOTICS. “The only standard components used in the machine are motors, motor shaft seals, ball bearings, small hardware (nuts) and batteries. All other components are specific and designed with Fusion 360.”
Even with two teams—one for mechanical design and another dedicated to electronics—working in separate locations, Fusion 360 provides a seamless experience. The teams design electronic cards; design and assemble mechanical parts; create 2D and 3D blueprints and 3D-rendered images; and perform PCB layout, PCB manufacturing (CAM) and PCB design integration.

“By using Fusion 360 Electronics for PCB design, the generation of the PCB outline from mechanical parts is very complete and intuitive,” Rossi explains. “We use both methods of associative PCB and the edit-in-place workflow. The edit-in-place workflow is very powerful and allows a fast and precise mechanical/electrical integration.”
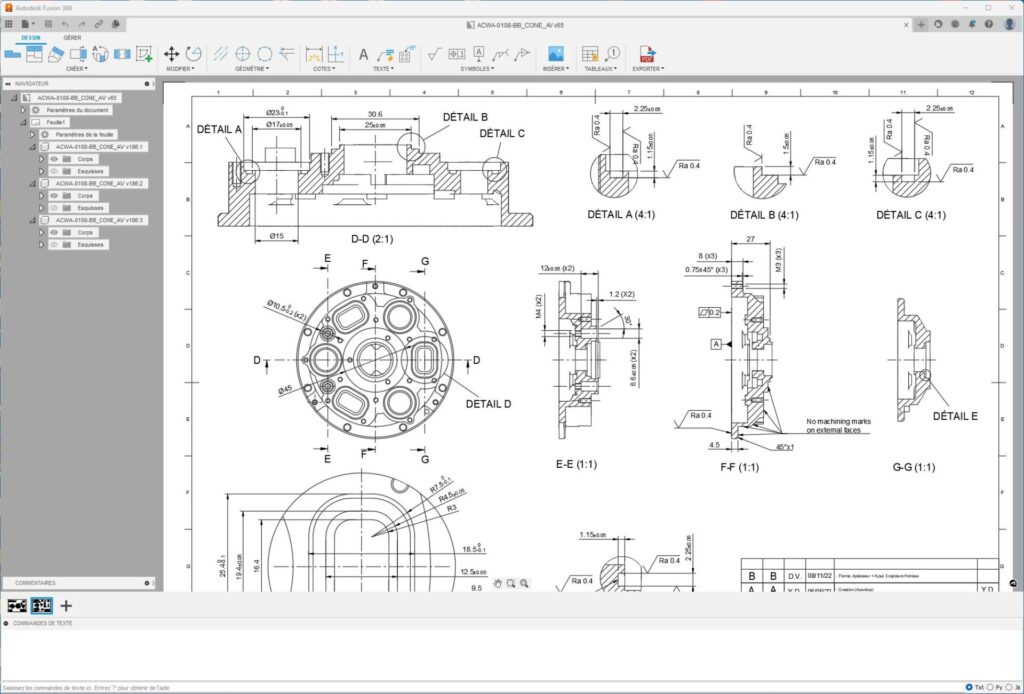
“The generation of drawings is very complete and fast with Fusion 360, and managing changes to 3D models is also very powerful. Wherever we are, Fusion 360 enables efficient, real-time collaboration between the engineers involved in the project.”
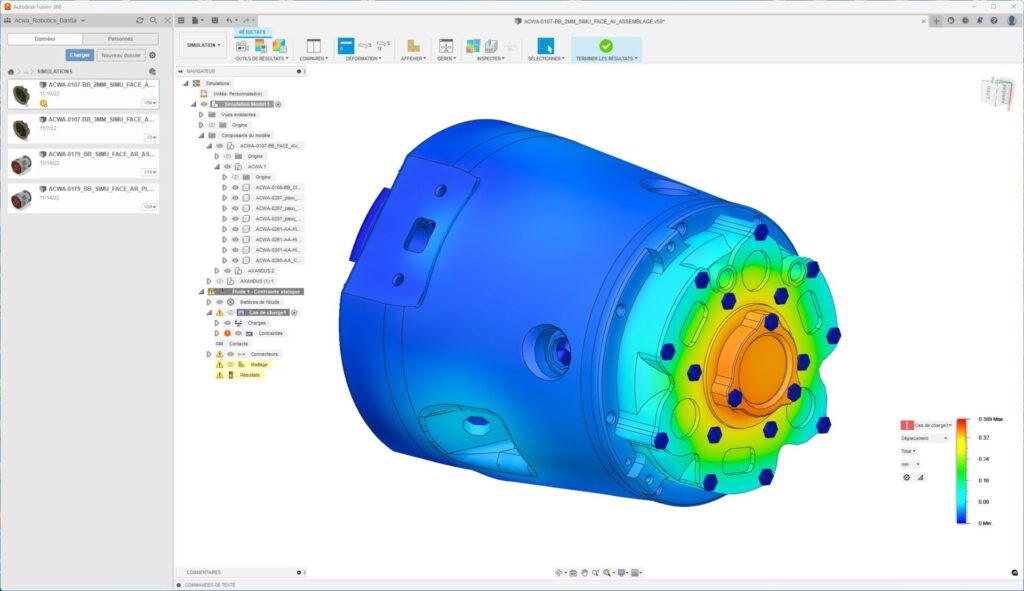
Mechanical strength simulation with Fusion 360 is also a critical component of their design process. “We use static stress simulation and thermal simulation,” Rossi says. “In these areas, Fusion 360 is very intuitive, and the results are precise.”