„Man meint immer, Pflanzen seien unbeweglich, aber das liegt nur daran, dass sie sich in Zeitskalen bewegen, die wir gar nicht wahrnehmen“, sagt Thomas Speck. „Mit Zeitrafferaufnahmen kann man genau hinsehen. Und dann merkt man, dass da richtig Action ist.“ Es ist leicht, ihm das zu glauben, und noch leichter ist es, sich anstecken zu lassen von seiner Begeisterung für etwas, was man täglich als selbstverständlich und gegeben erachtet. Der Efeu am Nachbarhaus, der an der Wand rankt, die Bäume, deren Blätter der Wind kitzelt, all das muss irgendwann gewachsen sein und war nicht immer einfach da.
Thomas Speck meint, vielen Menschen fehle der Bezug zur Wahrnehmung von Natur. Die Natur als Begriff sei stark geprägt von Märchen und Disneyfilmen, „symbolisch überhöht“ gar. Botanische Gärten würden mit riesigem Aufwand gepflegt, um ein Gefühl von Natur zu vermitteln. Aber eben nur ein Gefühl. Im Grunde sind sie höchst artifiziell. Andererseits: was macht das schon? Als Bioniker ist Speck ständig in der Symbiose von Artifiziellem und Natürlichem verschlungen. Er erforscht das Leben, um die Technik zu bereichern. Und sind die Analysen vollzogen, Ansätze und Umsetzungen gefunden, so geht die Technik meist weit über das hinaus, was sie ursprünglich zu imitieren versuchte. Technik, und so auch die Robotik, bedient sich der Natur, um Daseinsformen nach eigenen Gesetzmäßigkeiten zu finden und zu bauen.
Erkennbar wird dieser Opportunismus bei Robotern, die sich an Tieren orientieren. **„**Ganz oft wird so getan, als würde man Biomimetik betreiben und am Ende ist es keine“, sagt Tom Weihmann, Zoologe von der Universität Köln. Er meint damit die Freiheit der Ingenieure, sich zwar von „biologischen Designs“ inspirieren zu lassen, letztlich aber bauen zu können, wie und was beliebt. Dennoch wurde in den vergangenen Jahren eine ganze Reihe Roboter konstruiert, von denen ein Teil auf Erkenntnissen biologischer Grundlagenforschung basiert.
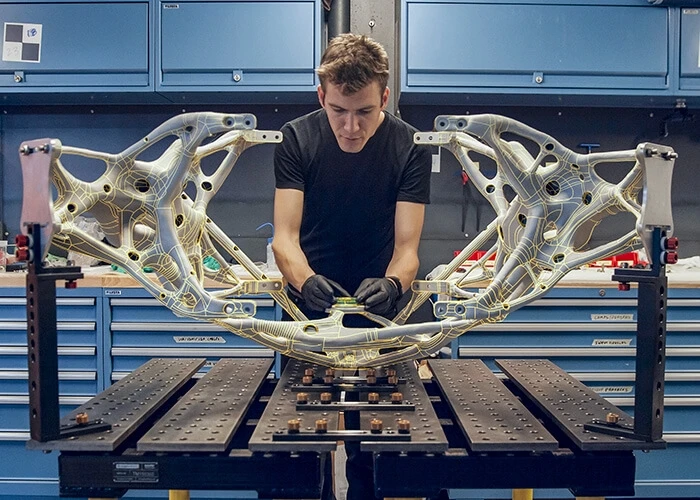
Vorbild ist, was kriecht, schwimmt, fliegt, läuft und krabbelt – um dann programmiert und trainiert zu werden für die wildesten Umweltbedingungen. Roboter müssen potentielle Temperaturen von mehr als 40 und minus 40 Grad aushalten und sind Gegebenheiten ausgesetzt, bei denen Tiere dahinraffen würden. Bei Marsexpeditionen zum Beispiel, wie das vierbeinige Modell eines Raumfahrt-Lander der NASA zeigt. Der Lander wurde mit Generativem Design entworfen, einer Methode mithilfe Künstlicher Intelligenz und Cloud Computing. Dabei entstehen Formen mit teils an die Natur angelehnten organischen Strukturen, ressourcenschonend modelliert mit möglichst minimal notwendigem Material.